
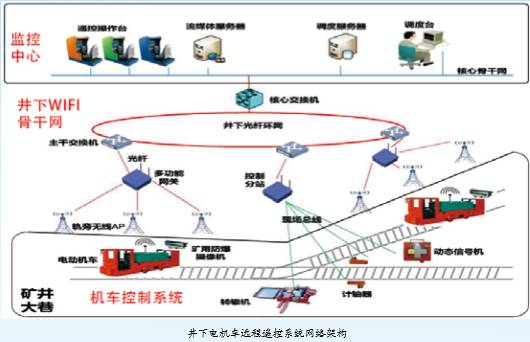
井下电机车远程遥控系统是利用变频技术、微电子控制技术、井下 GIS 技术、井下高精度定位技术和高带 宽、高可靠物联网技术,结合生产作业优化调度模型实现井下电机车遥控作业及变速巡航自运行。系统满足矿业现代化发展趋势,为数字化采矿奠定了重要的基础。
本系统由监控中心、井下 WIFI 骨干网、机车控制系统三部分组成,网络架构如上图所示监控中心包括:遥控操作台、媒体服务器、调度服务器、调度台、上位机监控软件。井下WIFI骨干网包括:核心交换机、主干网交换机、多功能网关、WIFI基站。机车控制系统包括:机车控制器、矿用防爆摄像机、动态信号机、转辙机、计轴器。
1) 系统可以准确检测到电机车位置及轨道占用情况,井下生产相关信息通过无线网络传递给监控中心,实现生产作业的优化调度;
2) 实时检测放矿/卸矿点物料信息,实现机车与放矿/卸矿的精准控制;
3) 结合机车位置信息和作业计划实现道岔正确联动和机车的遥控驾驶,可实现遥控、自运行和人工驾驶缝切换;
4) 采集机车本身状态信息以及轨道信息,电机车本身进行状态和安全驾驶全面诊断;
5) 可精确记录电机车的运行数据,实现配矿管理和生产业绩管理;
6) 能更加方便准确掌握电机车整体运输的负荷情况,最大发挥列车的运输能力。
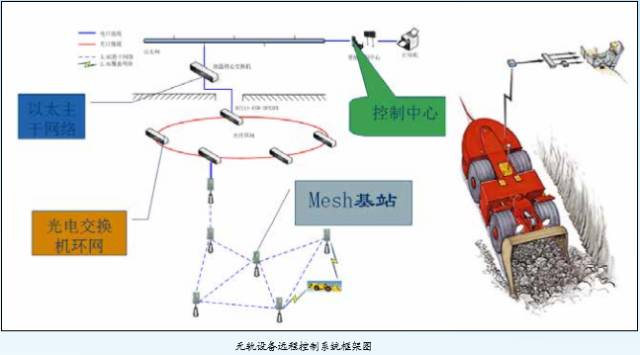
主要应用于金属矿、非金属矿远程遥控环境,在该环境下,基于WLAN技术标准下的无线MESH网络,或3G/4G无线通信网络,实现车辆的远程遥控管理。
1) 一对一的远程控制:遥控单元通过遥控手柄、脚踏板、按钮等,远程控制井下的各种移动机械,实现所需要的各种功能动作;
2) 多机联控:远程无线遥控系统可以实现一对多的控制。在一对多控制中,一个遥控手柄单元或者遥控座椅可以控制两个或者多个机车单元,使各机车联合作业,提高生产效率;
3) 机车导航:基于2.4G无线局域网络、ELinkCS机车自主导航算法、激光扫描识别系统可以实现铲运机的自主导航功能,在铲运机装货及卸货完成后可以自主行驶到装料区或卸料区,从而实现了铲运机高效出矿工作。
1) 遥控功能:由监控中心发送指令,遥控铲运机进行各种动作;
2) 视频监视:铲运机车头和车尾分别安装网络摄像头,用于远程监视工作环境,摄像头应具有防尘处理,其视频数据直接通过无线MESH网络上传到监控中心;
3) 称重功能:能实时显示每次铲矿单斗的重量以及累积重量,便于客户统计司机每个班次、月和年的工作量;
4) 运行状态监测(可选):由铲运机车载单元实时监测车辆运行状态,并上报给监控中心;
5) 声光报警:当铲运机运行状态监测参数超过设定门限时,由车载单元发出声光报警,同时将报警上传给监控中心;
6) 行车运行记录(可选):车载单元自动记录铲运机运行时的各种动作和状态,类似黑匣子功能,当铲运机出现故障时可通过串口直接读取;
7) 车辆定位(可选):在监控中心实时显示铲运机当前所处位置。一种方案是利用里程计数据,由监控中心软件规划好行驶路线,根据车载单元上报的里程计数据,显示当前所处位置。
8) 监控中心一对多控制(可选):即在监控中心,可通过切换同时控制多台铲运机。
